 gravbiz@mail.ru
gravbiz@mail.ru 


 Робот для сварки 2550
Робот для сварки 2550{vk}https://vk.com/video_ext.php?oid=-216709701&id=456239036&hd=2&autoplay=1{/vk}
5.4 Система координат инструмента (СКИ) Ot—Xt— Уt—Zt
Началом системы координат инструмента Ot является центральная точка инструмента (ЦТИ) Ot (см. рисунок 5).
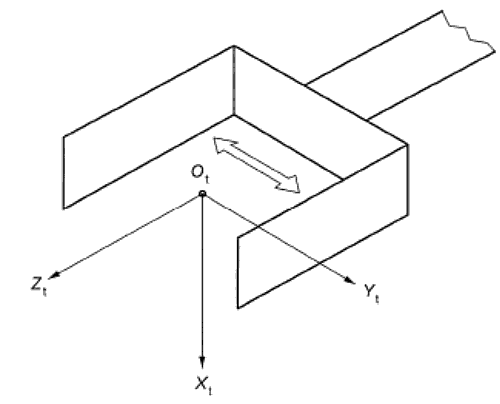
Направление оси +Zt, зависит от инструмента, обычно она направлена в сторону от инструмента. В случае плоского захватного устройства зажимного типа ось + Уm расположена в плоскости перемещения пальцев.
Источник: ГОСТ 60.0.03-2016 Роботы и робототехнические устройства Системы координат и обозначение перемещений (ISO 9787:2013, ЮТ)
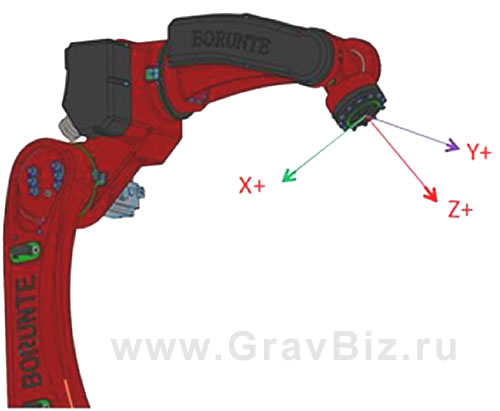
Индивидуальная система координат инструмента робота манипулятора
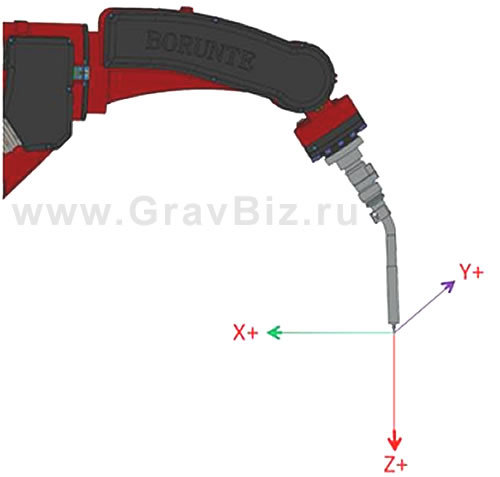
Система координат инструмента робота манипулятора по умолчанию
Справочник: Система координат инструмента (СКИ) Tool робота манипулятора





