 gravbiz@mail.ru
gravbiz@mail.ru 


 Робот для сварки 2550
Робот для сварки 2550Данные настройки включают сигнал тревоги, если ось (X, Y, Z, U, V, W) находится в пределах ограниченной зоны (restricted area) или выходят за пределы это зоны.
Ограниченная ось (назначенная ось) находится в пределах области или имеет изменения. Номер сигнала тревоги должен быть заполнен, как настраиваемый диапазон. Диапазон данных указывается значением адреса данных, аналогично с другими ,езопасными зонами. Избегайте конфликтов при их использовании.
Настройки
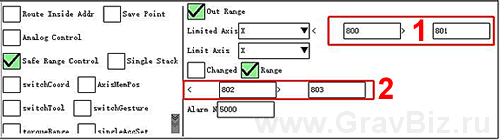
Установка команд за пределами диапазона
1 Ограничения -> Указать данные адреса
2 В ограниченной зоне -> Указать данные адреса
Описание параметров:
1. Within range/beyond range (В пределах или вне диапазона): установите данные в пределах диапазона ограничения оси.
Не в пределах установленного диапазона, если не отмечено.
В пределах установленного диапазона, если отмечено.
2. Restricted axis and set range (Ограниченная ось и установленный диапазон): выберите ограниченную ось и значение диапазона области. Значение диапазона предоставляется значением адреса данных. Диапазон адресов: 800-899;
2.1 Ось ограничения: назначьте ось ограничения;
3. Изменение/диапазон: условие оси ограничения;
3.1 Изменение: при установленном флажке сработает сигнализация, когда ось ограничения имеет действие, ограниченная ось находится в пределах установленного диапазона или за пределами диапазона;
3.2 Диапазон: при установленном флажке сработает ось ограничения в пределах установленного диапазона; сработает сигнализация, когда она превысит диапазон, ограниченная ось находится в пределах установленного диапазона или за пределами диапазона в соответствии с настройкой; диапазон области действия должен быть установлен.
4. Alarm number (Номер сигнала тревоги): введите номер сигнала тревоги. Допустимый диапазон сигналов тревоги от 9000 до 9999. Нельзя допускать конфликтов с другими сигналами тревоги.
Примечание:
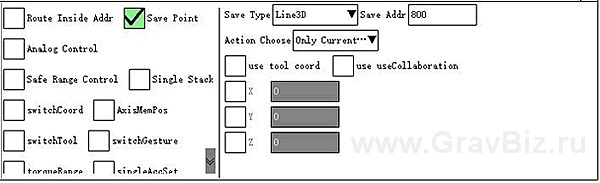
Редактирование безопасной зоны находится в подпрограмме 8 и пользователь может применять ее в соответствии с фактическими условиями. Диапазон расстояний между ограниченной осью и осью ограничения может быть адресом между 800~890. Входящий адрес не представляет фактическое расстояние, в то время как фактическое расстояние должно быть установлено в команде данных.
Пример Ситуация 1:
Ось X находится в пределах диапазона 300~500,
Ось W имеет или изменяется или W не находится в пределах 0~100,
тогда система выдаст пользователю сигнал тревоги "9000".
 Условия установки в пределах диапазона
Условия установки в пределах диапазона
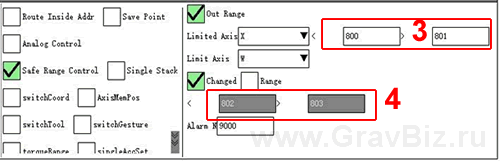
3 Ограничения -> Указать данные адреса
4 В ограниченной зоне -> Указать данные адреса
Пример Ситуация 2:
Ось X находится за пределами диапазона 300 ~ 500
Ось W двигается или выходит за предел диапазона 0 ~ 100,
тогда система выдаст пользователю сигнал «9000» .
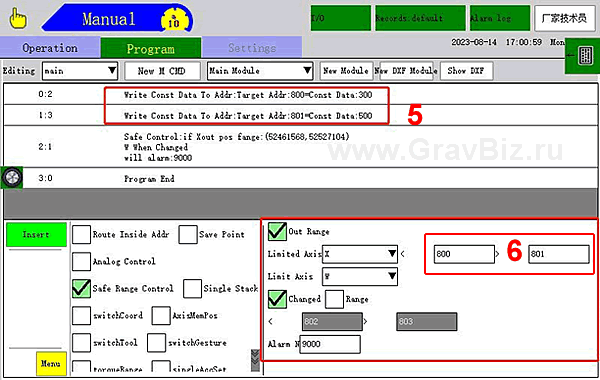 5 Диапазон заданного адреса данных 300 < X < 500
5 Диапазон заданного адреса данных 300 < X < 500
6 Ограниченный диапазон. Укажите адрес данных вместо значения диапазона.
Условие 1: Если ось W (ось ограничения) изменит свое положение, система выдаст сигнал тревоги «9000».
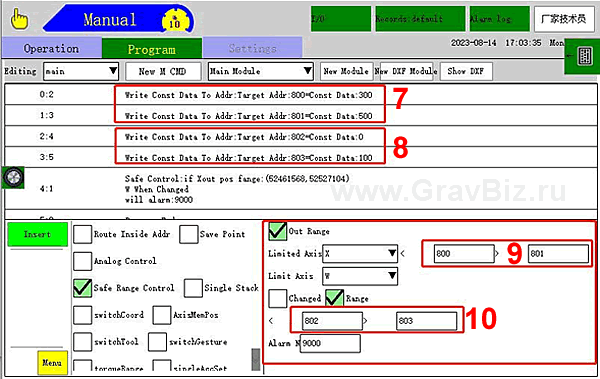
7 Диапазон заданного адреса данных 300 < X < 500
8 Диапазон заданного адреса данных 0 < W < 100
9 Ограниченный диапазон. Укажите адрес данных вместо значения диапазона.
10 Область действия ограничения. Вместо значения области действия введите адрес данных.
Условие 2: Если ось W (ось ограничения) не находится в диапазоне 0 ~ 100, система выдаст сигнал тревоги «9000».
Note: Special purpose command, trigger prompt alarm when the assigned axis (X, Y, Z, U, V, W) is within the restricted area (restricted axis) range or beyond the range value, the restricted axis (assigned axis) is in the area or has changes, the alarm number should be filled as customized range; the data range is provided by data address value; similar with other safety area, please avoid conflict while using it; the set parameters are as follows:
Parameter description:
1. Within range/beyond range: Set the data within the restricted axis range; not within the set range when not ticked;
within the set range when ticked;
2. Restricted axis and set range: Select the restricted axis and area range value; the range value is provided by data address value; address range: 800-899;
2. Restriction axis: Assign the restriction axis;
3. Change/range: Condition of restriction axis;
1. Change: When ticked, it will trigger alarm when the restriction axis has action, the restricted axis is within the set range or beyond the range;
2. Range: When ticked, the restriction axis has action within the set range; it will trigger alarm when it exceeds the
range, the restricted axis is within the set range or beyond the range according to the setting; the range of activity area should be set;
4. Alarm number: Fill the customized alarm number, customized alarm range is 9000-9999; it is not suggested to have conflict with other alarms;
Note:
Generally, the set edit of safety area is in subprogram 8 and user can apply it according to the actual conditions; the distance range between restricted axis and restriction axis can be the address between 800~890; the input address does not represent the actual distance, while the actual distance should be set in data command;
Example:
Assumption 1: Axis X is within 300~500, W has or change or W is not within 0~100, then the system will give alarm of "9000" to reminder the user;
The conditions are set within the range
Assumption 2: Axis X is not within 300 ~ 500 and W has change, or W is not within 0 ~ 100, then the system will give alarm of "9000" to reminder the user;
Condition 1: When Axis W (restriction axis) has position change, the system will give alarm of "9000"
Condition 2:When W (restriction axis) is not within the range of 0 ~ 100, the system will give alarm of "9000".





