 gravbiz@mail.ru
gravbiz@mail.ru 


 Робот для сварки 2550
Робот для сварки 2550



Система координат механического интерфейса - Система координат промышленных роботов (манипуляторов), связанная с механическим интерфейсом
Источник: ГОСТ 30097-93 Роботы промышленные Системы координат и направления движений
5.3 Система координат механического интерфейса Оm —Хm — Уm —Zm
Началом системы координат механического интерфейса От является центр механического интерфейса Оm.
Ось +Zm направлена перпендикулярно в сторону от механического интерфейса. Ось +Хm
определена как линия, параллельная оси +Z, (+X1), когда механический интерфейс расположен параллельно плоскости V1Z1 (Х1У,), а основные и дополнительные степени подвижности робота находятся вблизи своих средних положений. Если конфигурация робота препятствует выполнению данного соглашения, то положение основных степеней подвижности должно быть определено изготовителем (см. рисунокЗ).
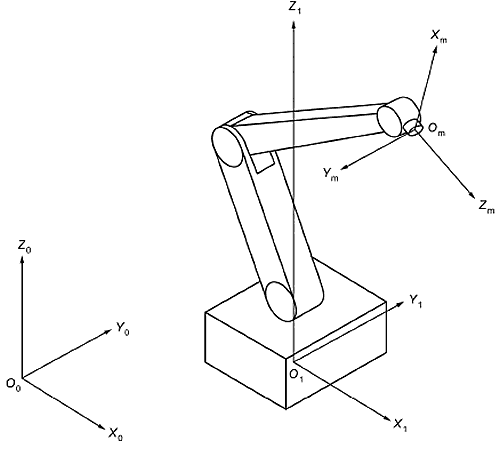
Примечание: Примеры систем координат основания и механического интерфейса приведены в приложении А.
Источник: ГОСТ 60.0.03-2016 Роботы и робототехнические устройства Системы координат и обозначение перемещений (ISO 9787:2013, ЮТ)







